




El laboratorio está alfombrado. Cámaras infrarrojas bordean las paredes en la parte superior. Una red separa una pequeña sección donde los estudiantes trabajan en una mesa con sus ordenadores portátiles, afinando sus pequeños robots para presentarlos a los periodistas que visitan las instalaciones de la Universidad de California en Berkeley, como parte de las actividades del Congreso Mundial de Periodistas Científicos (WCJS2017).
Rodeados por un gabinete, motores, cables, piezas plásticas y electrónicas, y un tablero garabateado con ecuaciones, los futuros ingenieros comienzan la demostración. Justin Yim, estudiante de ingeniería del Laboratorio de Milisistemas Biomiméticos, muestra el robot saltarín SALTO (Saltatorial locomotion on Terrain Obstacles), inspirado en el gálago, un primate nocturno que habita en África.
El diseño de SALTO incluye actuadores, que hacen la función de los músculos, un resorte plástico que funciona como “tendón”, y su “pierna” es una pieza mecánica.
El pequeño y liviano robot brinca y hasta puede hacer una pirueta contra la pared como si caminara sobre ella.
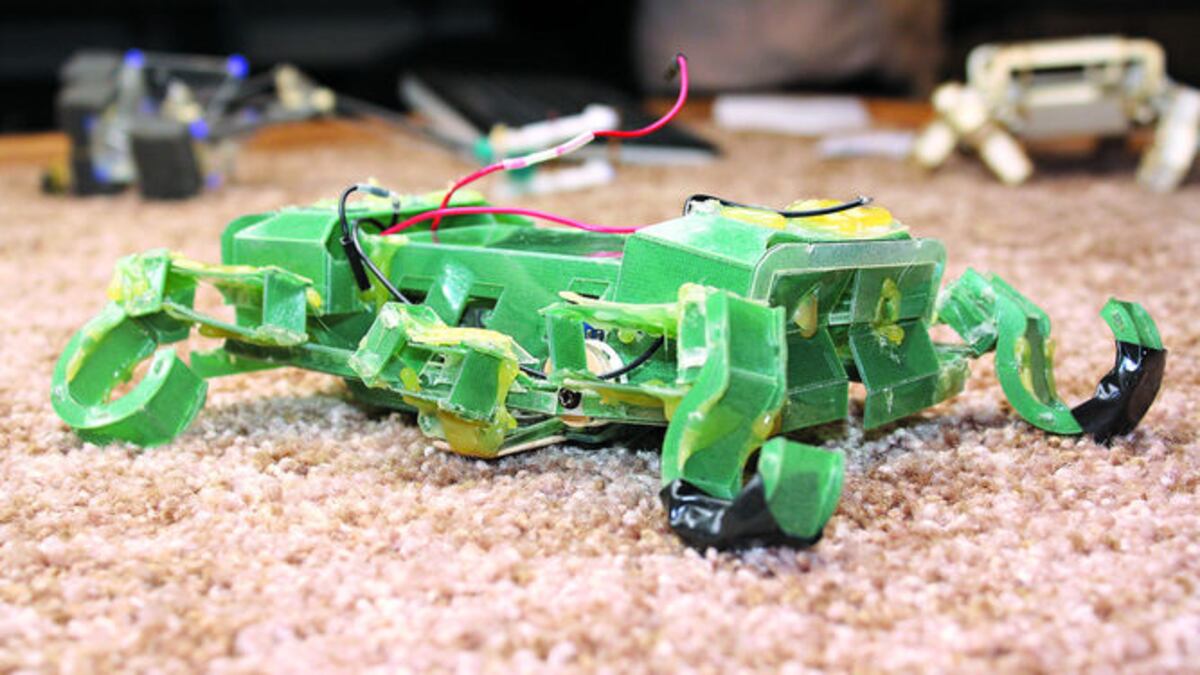
El VelociRoACH, que forma parte del grupo de robots estabilizados por aerodinámica, imita a las cucarachas.
Se desplaza por la alfombra igual que ellas: corre, cambia rápidamente de dirección y sus patas se mueven tal como las del insecto.
El propósito principal del laboratorio es diseñar robots con materiales económicos y usando tecnologías aditivas (impresión 3D) que puedan desplazarse con facilidad en entornos complicados –tierra, huecos, entre losas–, como en casos de derrumbes o sismos, y mapear un sitio, e incluso, llevar sensores, cámaras o micrófonos para ayudar en tareas de exploración y rescate.
Su diseño y tamaño le confieren ventaja frente a otros robots más grandes para realizar estas tareas. Y al ser económicos, pueden liberarse muchos de ellos a la vez.
Los ingenieros se inspiran en la biología y usan algoritmos basados en la genética, así como la física, dinámica y computación para dotar a sus robots de alta velocidad, capacidad de locomoción y de maniobrabilidad. Otros robots más avanzados pueden incorporar el aprendizaje de máquinas.
En otro laboratorio, tras un vidrio hay algunos prototipos de cartón y otros pequeños robots. El profesor Ron Fearing, del Departamento de Ingeniería Eléctrica y Ciencias Computacionales, hizo una demostración de cómo un insecto aprovecha la física para sus movimientos, como lo haría un gimnasta, y cómo se mueve como péndulo bajo una tablilla.
La investigación central del laboratorio gira en torno a la movilidad “todoterreno” inspirada en principios biológicos. Docentes y estudiantes trabajan en colaboración con los biólogos para desarrollar modelos funcionales que se integran en los milirrobots y se prueban en sistemas naturales. El laboratorio también investiga nuevos materiales con otras aplicaciones.
 Women Economic Forum Panamá 2025
Women Economic Forum Panamá 2025 Wine and Cocktail Fusion Fest 2025
Wine and Cocktail Fusion Fest 2025 AFRIK TATTO CONVENTION
AFRIK TATTO CONVENTION